深度缓冲
原文链接:https://kylemayes.github.io/vulkanalia/model/depth_buffering.html
Commit Hash: 7becee96b0029bf721f833039c00ea2a417714dd
本章代码:main.rs | shader.vert | shader.frag
我们的几何图形已经被投影到了三维空间中,但到目前为止它还是完全扁平的。在本章中我们会为位置添加一个 Z 坐标,以为 3D 网格做准备。我们将使用这第三个坐标来将一个正方形放在当前正方形上方,以观察当几何图形没有按深度排序时会出现的问题。
3D 几何图形
修改 Vertex 结构体,为位置使用一个 3D 向量,然后更新相应的 vk::VertexInputAttributeDescription 中的 format 字段,并更新其他的偏移量:
#[repr(C)]
#[derive(Copy, Clone, Debug)]
struct Vertex {
pos: Vec3,
color: Vec3,
tex_coord: Vec2,
}
impl Vertex {
const fn new(pos: Vec3, color: Vec3, tex_coord: Vec2) -> Self {
Self { pos, color, tex_coord }
}
fn binding_description() -> vk::VertexInputBindingDescription {
vk::VertexInputBindingDescription::builder()
.binding(0)
.stride(size_of::<Vertex>() as u32)
.input_rate(vk::VertexInputRate::VERTEX)
.build()
}
fn attribute_descriptions() -> [vk::VertexInputAttributeDescription; 3] {
let pos = vk::VertexInputAttributeDescription::builder()
.binding(0)
.location(0)
.format(vk::Format::R32G32B32_SFLOAT)
.offset(0)
.build();
let color = vk::VertexInputAttributeDescription::builder()
.binding(0)
.location(1)
.format(vk::Format::R32G32B32_SFLOAT)
.offset(size_of::<Vec3>() as u32)
.build();
let tex_coord = vk::VertexInputAttributeDescription::builder()
.binding(0)
.location(2)
.format(vk::Format::R32G32_SFLOAT)
.offset((size_of::<Vec3>() + size_of::<Vec3>()) as u32)
.build();
[pos, color, tex_coord]
}
}接着,更新顶点着色器来接受 3D 坐标作为输入。别忘了重新编译着色器!
layout(location = 0) in vec3 inPosition;
// ...
void main() {
gl_Position = ubo.proj * ubo.view * ubo.model * vec4(inPosition, 1.0);
fragColor = inColor;
fragTexCoord = inTexCoord;
}
最后,更新 VERTICES 来包含 Z 坐标:
static VERTICES: [Vertex; 4] = [
Vertex::new(vec3(-0.5, -0.5, 0.0), vec3(1.0, 0.0, 0.0), vec2(1.0, 0.0)),
Vertex::new(vec3(0.5, -0.5, 0.0), vec3(0.0, 1.0, 0.0), vec2(0.0, 0.0)),
Vertex::new(vec3(0.5, 0.5, 0.0), vec3(0.0, 0.0, 1.0), vec2(0.0, 1.0)),
Vertex::new(vec3(-0.5, 0.5, 0.0), vec3(1.0, 1.0, 1.0), vec2(1.0, 1.0)),
];如果你现在运行程序,你应该会看到和之前完全一样的结果。现在是时候添加一些额外的几何图形来让场景更有趣,并展示我们将在本章中解决的问题了。复制顶点来定义一个处在当前正方形下方的正方形的位置,像这样:

将新顶点的 Z 坐标设置为 -0.5,并为额外的正方形添加合适的索引:
static VERTICES: [Vertex; 8] = [
Vertex::new(vec3(-0.5, -0.5, 0.0), vec3(1.0, 0.0, 0.0), vec2(1.0, 0.0)),
Vertex::new(vec3(0.5, -0.5, 0.0), vec3(0.0, 1.0, 0.0), vec2(0.0, 0.0)),
Vertex::new(vec3(0.5, 0.5, 0.0), vec3(0.0, 0.0, 1.0), vec2(0.0, 1.0)),
Vertex::new(vec3(-0.5, 0.5, 0.0), vec3(1.0, 1.0, 1.0), vec2(1.0, 1.0)),
Vertex::new(vec3(-0.5, -0.5, -0.5), vec3(1.0, 0.0, 0.0), vec2(1.0, 0.0)),
Vertex::new(vec3(0.5, -0.5, -0.5), vec3(0.0, 1.0, 0.0), vec2(0.0, 0.0)),
Vertex::new(vec3(0.5, 0.5, -0.5), vec3(0.0, 0.0, 1.0), vec2(0.0, 1.0)),
Vertex::new(vec3(-0.5, 0.5, -0.5), vec3(1.0, 1.0, 1.0), vec2(1.0, 1.0)),
];
const INDICES: &[u16] = &[
0, 1, 2, 2, 3, 0,
4, 5, 6, 6, 7, 4,
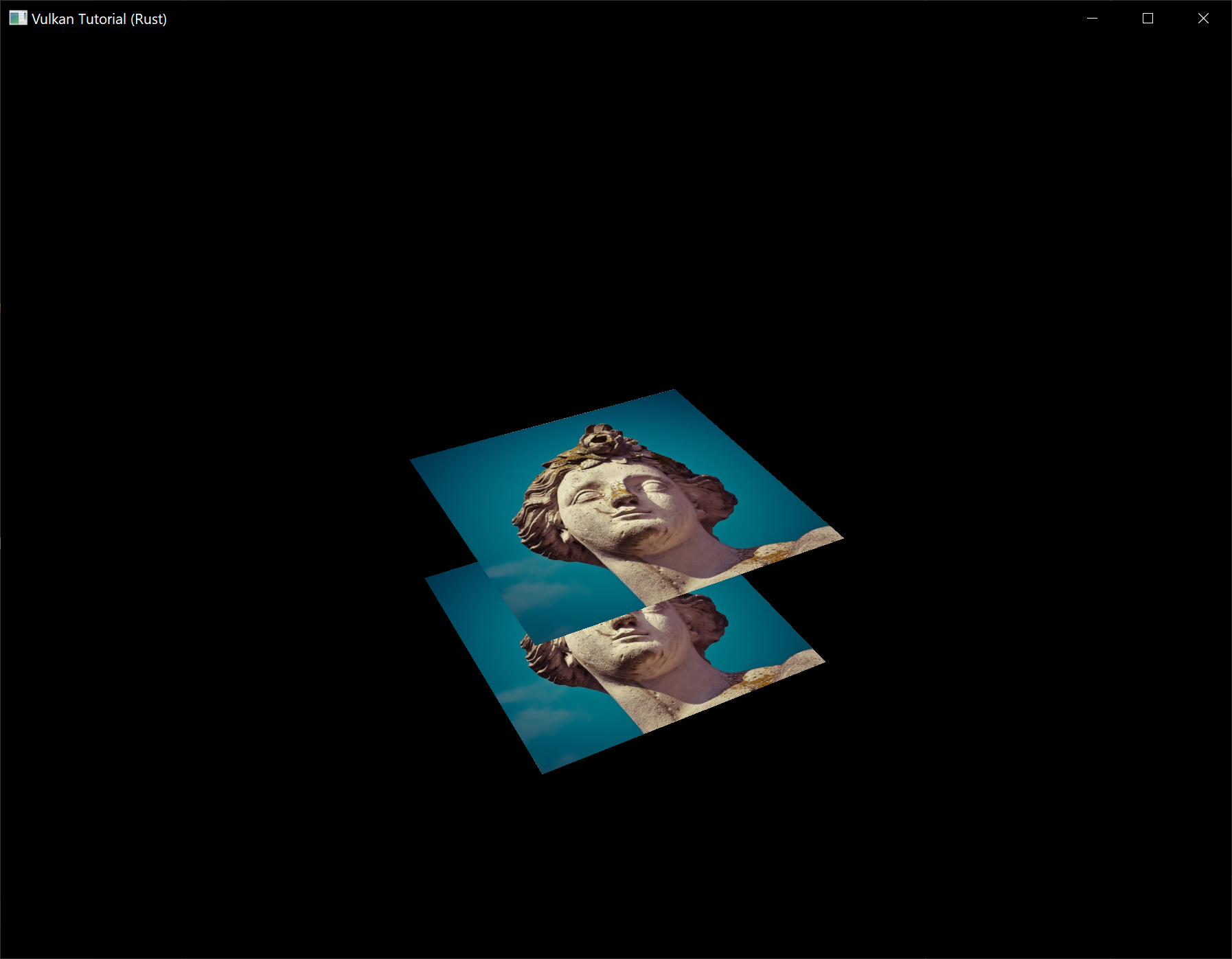
];运行程序,你会看到类似于埃舍尔(Escher)艺术作品的图像:

译注:莫里茨·科内利斯·埃舍尔 是荷兰著名版画艺术家,因其视错觉艺术作品而闻名。
问题在于下面的正方形的片元覆盖了上面的正方形的片元,而这仅仅是因为它在索引数组中出现的更晚。有两种方法可以解决这个问题:
- 将所有绘制调用按深度从后向前排序
- 使用深度缓冲进行深度测试
第一种方法通常用于绘制透明物体,因为要实现与绘制顺序无关的透明是很困难的。然而,要根据深度对片元排序,更常见的做法是使用深度缓冲(depth buffer)。深度缓冲是一个额外的附件,它存储了每个位置的深度,就像颜色附件存储了每个位置的颜色一样。每当光栅化器产生一个片元时,深度测试会检查新片元是否比之前的更“近”。如果不是,则丢弃新片元。通过深度测试的片元会将自己的深度写入深度缓冲。深度值也可以从片元着色器中操作,就像操作颜色输出一样。
在我们继续之前,有一个问题需要解决。App::update_uniform_buffer 中 cgmath::perspective 生成的透视投影矩阵使用了 OpenGL 的深度范围 -1.0 到 1.0。我们想要使用 Vulkan 的深度范围 0.0 到 1.0,所以我们将生成的透视矩阵与一个校正矩阵相乘,将 OpenGL 的范围映射到 Vulkan 的范围:
let correction = Mat4::new(
1.0, 0.0, 0.0, 0.0,
// 我们同时通过这行的 `-1.0` 翻转了 Y 轴。
0.0, -1.0, 0.0, 0.0,
0.0, 0.0, 1.0 / 2.0, 0.0,
0.0, 0.0, 1.0 / 2.0, 1.0,
);
let proj = correction
* cgmath::perspective(
Deg(45.0),
self.data.swapchain_extent.width as f32 / self.data.swapchain_extent.height as f32,
0.1,
10.0,
);
// 下面这行已经不需要了,因为我们已经使用新的校正矩阵反转了 Y 轴。
// proj[1][1] *= -1.0;注意 cgmath::Matrix4::new 以列主序构造矩阵,所以我们传递给它的参数看起来像是被转置过。实际构造出的矩阵在行主序下看起来像这样:
1 0 0 0
0 -1 0 0
0 0 ½ ½
0 0 0 1
深度图像与视图
和颜色附件一样,深度附件也是基于图像的。区别在于交换链不会自动为我们创建深度图像。我们只需要一个深度图像,因为同时只有一个绘制操作在运行。深度图像同样需要三个资源:图像、内存和图像视图。
struct AppData {
// ...
depth_image: vk::Image,
depth_image_memory: vk::DeviceMemory,
depth_image_view: vk::ImageView,
}创建一个新函数 create_depth_objects 来设置这些资源:
impl App {
unsafe fn create(window: &Window) -> Result<Self> {
// ...
create_command_pool(&instance, &device, &mut data)?;
create_depth_objects(&instance, &device, &mut data)?;
// ...
}
}
unsafe fn create_depth_objects(
instance: &Instance,
device: &Device,
data: &mut AppData,
) -> Result<()> {
Ok(())
}创建深度图像非常直观。深度图像应该具有以下属性:由交换链范围定义的、与颜色附件相同的分辨率,适用于深度附件的图像用法,最佳平铺模式,并且存储在设备本地内存中。唯一的问题是:深度图像的正确格式是什么?格式必须包含一个深度分量,由 vk::Format 变体中的 D??_ 表示。
不同于纹理图像的是,我们并不需要一个特定的像素格式,因为我们不会直接在程序中访问深度图像中的像素。深度图像中的像素只要有一个合理的精度就行。现实世界中的应用程序通常都使用至少 24 位的精度,有几种格式符合这个要求:
vk::Format::D32_SFLOAT– 为深度使用 32 位浮点数vk::Format::D32_SFLOAT_S8_UINT– 为深度使用 32 位有符号浮点数,同时为模板分量使用 8 个位vk::Format::D24_UNORM_S8_UINT– 为深度使用 24 位浮点数,同时为模板分量使用 8 个位
模板分量可以被用于模板测试,模板测试可以与深度测试结合使用。我们将在未来的章节中讨论这个。
我们可以直接选择 vk::Format::D32_SFLOAT,因为它的支持非常普遍(参见硬件数据库),但是在可能的情况下,为我们的应用程序增加一些额外的灵活性是很好的。我们将编写一个 get_supported_format 函数,它接受一个候选格式列表,将其中的格式按照最理想到最不理想的顺序排列,并返回第一个满足我们要求的格式:
unsafe fn get_supported_format(
instance: &Instance,
data: &AppData,
candidates: &[vk::Format],
tiling: vk::ImageTiling,
features: vk::FormatFeatureFlags,
) -> Result<vk::Format> {
candidates
.iter()
.cloned()
.find(|f| {
})
.ok_or_else(|| anyhow!("Failed to find supported format!"))
}受支持的格式与图像的平铺模式和用法有关,因此我们必须将它们作为参数传递。可以使用 get_physical_device_format_properties 函数查询支持的格式:
let properties = instance.get_physical_device_format_properties(
data.physical_device,
*f,
);vk::FormatProperties 结构体有以下字段:
linear_tiling_features– 支持线性平铺模式的用例optimal_tiling_features– 支持最佳平铺模式的用例buffer_features– 支持缓冲的用例
只有前两个与本章相关,我们根据 tiling 参数的值来检查其中的一个:
match tiling {
vk::ImageTiling::LINEAR => properties.linear_tiling_features.contains(features),
vk::ImageTiling::OPTIMAL => properties.optimal_tiling_features.contains(features),
_ => false,
}现在我们将使用这个函数来创建一个 get_depth_format 辅助函数,以选择一个支持用作深度附件的深度分量格式:
unsafe fn get_depth_format(instance: &Instance, data: &AppData) -> Result<vk::Format> {
let candidates = &[
vk::Format::D32_SFLOAT,
vk::Format::D32_SFLOAT_S8_UINT,
vk::Format::D24_UNORM_S8_UINT,
];
get_supported_format(
instance,
data,
candidates,
vk::ImageTiling::OPTIMAL,
vk::FormatFeatureFlags::DEPTH_STENCIL_ATTACHMENT,
)
}从 create_depth_objects 调用该函数来选择深度格式:
let format = get_depth_format(instance, data)?;现在我们已经有了调用 create_image 和 create_image_view 辅助函数所需的所有信息:
let (depth_image, depth_image_memory) = create_image(
instance,
device,
data,
data.swapchain_extent.width,
data.swapchain_extent.height,
format,
vk::ImageTiling::OPTIMAL,
vk::ImageUsageFlags::DEPTH_STENCIL_ATTACHMENT,
vk::MemoryPropertyFlags::DEVICE_LOCAL,
)?;
data.depth_image = depth_image;
data.depth_image_memory = depth_image_memory;
// Image View
data.depth_image_view = create_image_view(device, data.depth_image, format)?;然而,create_image_view 函数目前假设子资源总是使用 vk::ImageAspectFlags::COLOR,因此我们需要将该字段变成一个参数:
unsafe fn create_image_view(
device: &Device,
image: vk::Image,
format: vk::Format,
aspects: vk::ImageAspectFlags,
) -> Result<vk::ImageView> {
let subresource_range = vk::ImageSubresourceRange::builder()
.aspect_mask(aspects)
.base_mip_level(0)
.level_count(1)
.base_array_layer(0)
.layer_count(1);
// ...
}更新所有调用点,传递正确的 aspects:
create_image_view(device, *i, data.swapchain_format, vk::ImageAspectFlags::COLOR)
// ...
data.depth_image_view = create_image_view(
device,
data.depth_image,
format,
vk::ImageAspectFlags::DEPTH,
)?;
// ...
data.texture_image_view = create_image_view(
device,
data.texture_image,
vk::Format::R8G8B8A8_SRGB,
vk::ImageAspectFlags::COLOR,
)?;创建深度图像就是这样。我们不需要映射它或将另一个图像复制到它,因为我们将在渲染通道的开始处清除它,就像颜色附件一样。
显式转换深度图像
我们不需要显式地将图像的布局转换为深度附件,因为我们将在渲染流程中处理这个问题。然而,为了完整起见,我仍然会在本节中描述这个过程。如果你愿意,你可以跳过它。
在 create_depth_objects 函数的最后,像这样调用 transition_image_layout:
transition_image_layout(
device,
data,
data.depth_image,
format,
vk::ImageLayout::UNDEFINED,
vk::ImageLayout::DEPTH_STENCIL_ATTACHMENT_OPTIMAL,
)?;未定义布局可以被作为初始布局,因为深度图像中没有需要考虑的现有内容。我们需要更新 transition_image_layout 中的一些逻辑,以使用正确的子资源 aspect:
**注意:**第一个
|运算符描述了一个模式,它匹配match分支中指定的任意一个vk::Format。与此同时,第二个|运算符是按位或运算符,它将我们在这段代码中想要启用的vk::ImageAspectFlags位组合在一起。
let aspect_mask = if new_layout == vk::ImageLayout::DEPTH_STENCIL_ATTACHMENT_OPTIMAL {
match format {
vk::Format::D32_SFLOAT_S8_UINT | vk::Format::D24_UNORM_S8_UINT =>
vk::ImageAspectFlags::DEPTH | vk::ImageAspectFlags::STENCIL,
_ => vk::ImageAspectFlags::DEPTH
}
} else {
vk::ImageAspectFlags::COLOR
};
let subresource = vk::ImageSubresourceRange::builder()
.aspect_mask(aspect_mask)
.base_mip_level(0)
.level_count(1)
.base_array_layer(0)
.layer_count(1);尽管我们没有用到模板分量,我们仍然需要在深度图像的布局转换中包含它。
最后,添加正确的访问掩码和管线阶段:
let (
src_access_mask,
dst_access_mask,
src_stage_mask,
dst_stage_mask,
) = match (old_layout, new_layout) {
(vk::ImageLayout::UNDEFINED, vk::ImageLayout::DEPTH_STENCIL_ATTACHMENT_OPTIMAL) => (
vk::AccessFlags::empty(),
vk::AccessFlags::DEPTH_STENCIL_ATTACHMENT_READ | vk::AccessFlags::DEPTH_STENCIL_ATTACHMENT_WRITE,
vk::PipelineStageFlags::TOP_OF_PIPE,
vk::PipelineStageFlags::EARLY_FRAGMENT_TESTS,
),
// ...
};深度缓冲会被读取并进行深度测试来判断片元是否可见,并且当绘制新片元时会被写入。读取发生在 vk::PipelineStageFlags::EARLY_FRAGMENT_TESTS 阶段,写入发生在 vk::PipelineStageFlags::LATE_FRAGMENT_TESTS 阶段。你应该选择最早的管线阶段来匹配指定的操作,这样就能确保深度图像在需要作为深度附件使用时已经就绪。
渲染流程
我们将修改 create_render_pass 函数来包含一个深度附件。首先指定 vk::AttachmentDescription:
let depth_stencil_attachment = vk::AttachmentDescription::builder()
.format(get_depth_format(instance, data)?)
.samples(vk::SampleCountFlags::_1)
.load_op(vk::AttachmentLoadOp::CLEAR)
.store_op(vk::AttachmentStoreOp::DONT_CARE)
.stencil_load_op(vk::AttachmentLoadOp::DONT_CARE)
.stencil_store_op(vk::AttachmentStoreOp::DONT_CARE)
.initial_layout(vk::ImageLayout::UNDEFINED)
.final_layout(vk::ImageLayout::DEPTH_STENCIL_ATTACHMENT_OPTIMAL);format 字段应该与深度图像的格式相同。这次我们不关心存储深度数据(store_op),因为在绘制完成后它将不会被使用。这可能允许硬件执行额外的优化。就像颜色缓冲一样,我们不关心之前的深度内容,所以我们可以使用 vk::ImageLayout::UNDEFINED 作为 initial_layout。
let depth_stencil_attachment_ref = vk::AttachmentReference::builder()
.attachment(1)
.layout(vk::ImageLayout::DEPTH_STENCIL_ATTACHMENT_OPTIMAL);在第一个(也是唯一一个)子流程中添加对深度附件的引用:
let subpass = vk::SubpassDescription::builder()
.pipeline_bind_point(vk::PipelineBindPoint::GRAPHICS)
.color_attachments(color_attachments)
.depth_stencil_attachment(&depth_stencil_attachment_ref);不同于颜色附件的是,一个子流程只能使用一个深度(以及模板)附件。在多个缓冲上进行深度测试没有任何意义。
let attachments = &[color_attachment, depth_stencil_attachment];
let subpasses = &[subpass];
let dependencies = &[dependency];
let info = vk::RenderPassCreateInfo::builder()
.attachments(attachments)
.subpasses(subpasses)
.dependencies(dependencies);接着,更新 vk::RenderPassCreateInfo 结构体,引用两个附件。
let dependency = vk::SubpassDependency::builder()
.src_subpass(vk::SUBPASS_EXTERNAL)
.dst_subpass(0)
.src_stage_mask(vk::PipelineStageFlags::COLOR_ATTACHMENT_OUTPUT
| vk::PipelineStageFlags::EARLY_FRAGMENT_TESTS)
.src_access_mask(vk::AccessFlags::empty())
.dst_stage_mask(vk::PipelineStageFlags::COLOR_ATTACHMENT_OUTPUT
| vk::PipelineStageFlags::EARLY_FRAGMENT_TESTS)
.dst_access_mask(vk::AccessFlags::COLOR_ATTACHMENT_WRITE
| vk::AccessFlags::DEPTH_STENCIL_ATTACHMENT_WRITE);Finally, we need to extend our subpass dependencies to make sure that there is no conflict between the transitioning of the depth image and it being cleared as part of its load operation. The depth image is first accessed in the early fragment test pipeline stage and because we have a load operation that clears, we should specify the access mask for writes.
最后我们需要扩展我们的子流程依赖,以确保深度图像的转换和它在加载操作时的清除操作之间没有冲突。深度图像会在早期片元测试阶段被使用,并且因为我们指定了清除的加载操作,所以我们应该为写入指定访问掩码。
帧缓冲
下一步是修改帧缓冲的创建,将深度图像绑定到深度附件。转到 create_framebuffers,将深度图像视图指定为第二个附件:
let attachments = &[*i, data.depth_image_view];
let create_info = vk::FramebufferCreateInfo::builder()
.render_pass(data.render_pass)
.attachments(attachments)
.width(data.swapchain_extent.width)
.height(data.swapchain_extent.height)
.layers(1);每个交换链图像都有各自的颜色附件,但是由于我们的信号量,因为同一时间只有一个子流程在运行,因此所有交换链图像都可以使用同一个深度图像。
你还需要移动对 create_framebuffers 的调用,以确保它在深度图像视图实际创建后被调用:
unsafe fn create(window: &Window) -> Result<Self> {
// ...
create_depth_objects(&instance, &device, &mut data)?;
create_framebuffers(&device, &mut data)?;
// ...
}清除值
因为现在我们有多个具有 vk::AttachmentLoadOp::CLEAR 的附件,所以我们也需要指定多个清除值。转到 create_command_buffers,并在 clear_values 数组中添加一个 vk::ClearValue 实例:
let color_clear_value = vk::ClearValue {
color: vk::ClearColorValue {
float32: [0.0, 0.0, 0.0, 1.0],
},
};
let depth_clear_value = vk::ClearValue {
depth_stencil: vk::ClearDepthStencilValue {
depth: 1.0,
stencil: 0,
},
};
let clear_values = &[color_clear_value, depth_clear_value];深度缓冲中的深度值范围是 0.0 到 1.0,其中 1.0 位于远平面,0.0 位于近平面。深度缓冲中每个点的初始值应该是最远的深度,即 1.0。
注意 clear_values 的顺序应该与你的附件的顺序相同。
深度与模板状态
深度附件现在已经可以使用了,接下来还需要在图形管线中启用深度测试。它通过 vk::PipelineDepthStencilStateCreateInfo 结构体进行配置:
let depth_stencil_state = vk::PipelineDepthStencilStateCreateInfo::builder()
.depth_test_enable(true)
.depth_write_enable(true)
// continued ...depth_test_enable 字段指定新片元的深度是否应该与深度缓冲进行比较,以判断它们是否应该被丢弃。depth_write_enable 字段指定通过深度测试的片元的新深度是否应该被写入深度缓冲。
.depth_compare_op(vk::CompareOp::LESS)depth_compare_op 字段指定用于决定保留还是丢弃片元的比较方式。我们使用较低的深度 = 更近的约定,因此新片元的深度应该是较低的。
.depth_bounds_test_enable(false)
.min_depth_bounds(0.0) // Optional.
.max_depth_bounds(1.0) // Optional.depth_bounds_test_enable、min_depth_bounds 和 max_depth_bounds 字段用于可选的深度范围测试。简单来说,这允许你只保留落在指定深度范围内的片元。我们不会使用这个功能。
.stencil_test_enable(false)
.front(/* vk::StencilOpState */) // Optional.
.back(/* vk::StencilOpState */); // Optional.最后三个字段配置模板缓冲操作,我们在本教程中也不会使用。如果你想使用这些操作,那么你必须确保深度/模板图像的格式包含模板分量。
let info = vk::GraphicsPipelineCreateInfo::builder()
.stages(stages)
.vertex_input_state(&vertex_input_state)
.input_assembly_state(&input_assembly_state)
.viewport_state(&viewport_state)
.rasterization_state(&rasterization_state)
.multisample_state(&multisample_state)
.depth_stencil_state(&depth_stencil_state)
.color_blend_state(&color_blend_state)
.layout(data.pipeline_layout)
.render_pass(data.render_pass)
.subpass(0);更新 vk::GraphicsPipelineCreateInfo 结构体,引用我们刚刚填充的深度模板状态。如果渲染通道包含深度模板附件,则总是需要指定深度模板状态。
如果你现在运行程序,你应该会看到几何体的片元现在被正确排序了:
处理窗口大小变化
当窗口大小改变时,深度缓冲的分辨率应该改变,以匹配新的颜色附件分辨率。在这种情况下,扩展 App::recreate_swapchain 方法来重新创建深度资源:
unsafe fn recreate_swapchain(&mut self, window: &Window) -> Result<()> {
self.device.device_wait_idle()?;
self.destroy_swapchain();
create_swapchain(window, &self.instance, &self.device, &mut self.data)?;
create_swapchain_image_views(&self.device, &mut self.data)?;
create_render_pass(&self.instance, &self.device, &mut self.data)?;
create_pipeline(&self.device, &mut self.data)?;
create_depth_objects(&self.instance, &self.device, &mut self.data)?;
create_framebuffers(&self.device, &mut self.data)?;
create_uniform_buffers(&self.instance, &self.device, &mut self.data)?;
create_descriptor_pool(&self.device, &mut self.data)?;
create_descriptor_sets(&self.device, &mut self.data)?;
create_command_buffers(&self.device, &mut self.data)?;
Ok(())
}清理操作应该在交换链清理函数中发生:
unsafe fn destroy_swapchain(&mut self) {
self.device.destroy_image_view(self.data.depth_image_view, None);
self.device.free_memory(self.data.depth_image_memory, None);
self.device.destroy_image(self.data.depth_image, None);
// ...
}恭喜,你的应用程序现在终于可以正确地渲染任意的 3D 几何体了。我们将在下一章中通过绘制一个带纹理的模型尝试这项功能!